3.3. Code Organization
The CVODE package is written in ANSI C. The following summarizes the basic structure of the package, although knowledge of this structure is not necessary for its use.
The overall organization of the CVODE package is shown in Figure Fig. 3.1.
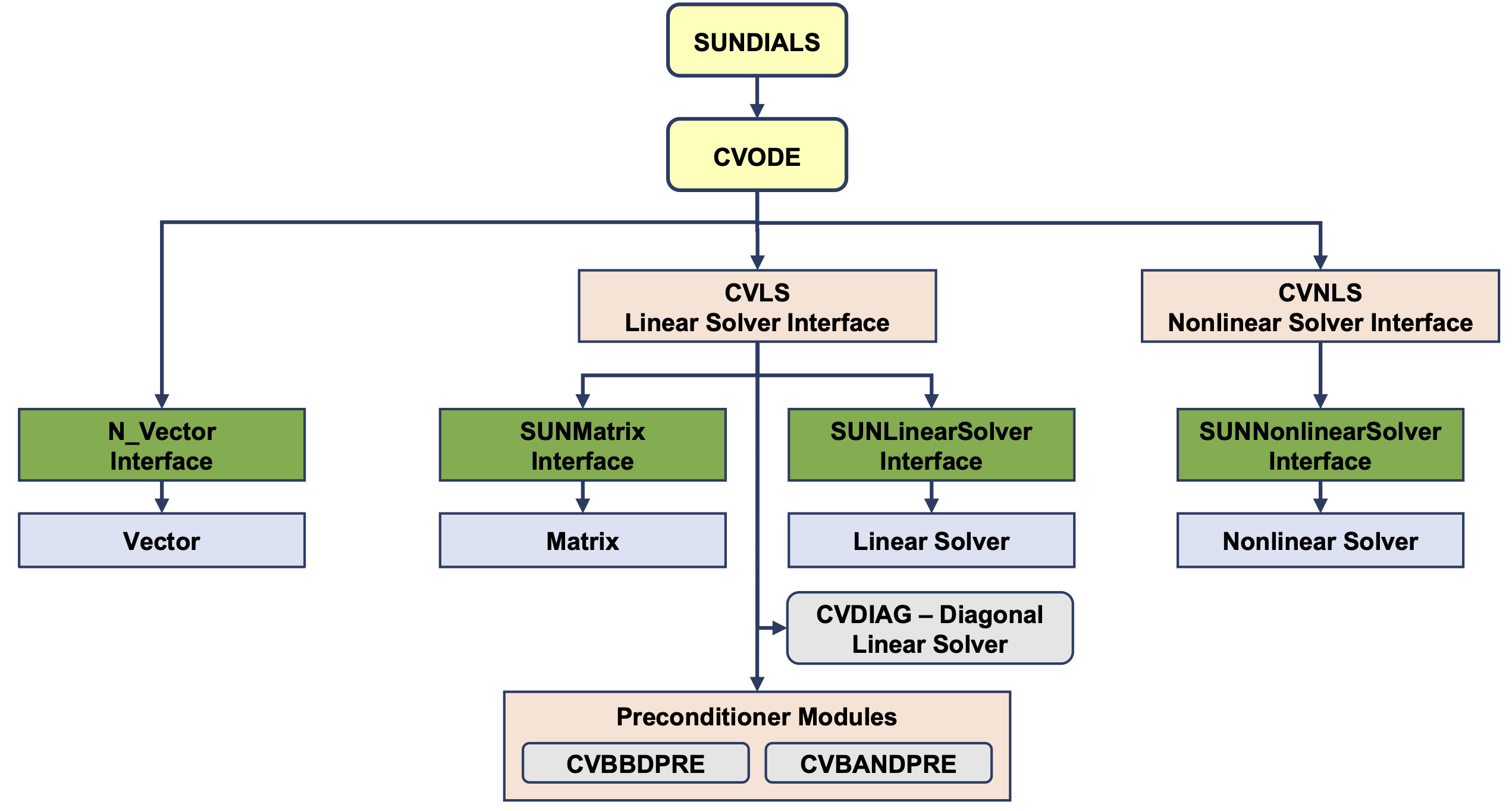
Fig. 3.1 Overall structure diagram of the CVODE package. Modules specific to CVODE begin with “CV” (CVLS, CVNLS, CVDIAG, CVBBDPRE, and CVBANDPRE), all other items correspond to generic SUNDIALS vector, matrix, and solver modules.
The central integration module, implemented in the files cvode.h,
cvode_impl.h, and cvode.c, deals with the evaluation of integration
coefficients, estimation of local error, selection of stepsize and order, and
interpolation to user output points, among other issues.
CVODE utilizes generic linear and nonlinear solver modules defined
by the SUNLinearSolver API (see §10)
and SUNNonlinearSolver API (see §11) respectively. As such, CVODE
has no knowledge of the method being used to solve the linear and
nonlinear systems that arise. For any given user problem, there exists a
single nonlinear solver interface and, if necessary, one of the linear
system solver interfaces is specified, and invoked as needed during the
integration.
At present, the package includes two linear solver interfaces. The
primary linear solver interface, CVLS, supports both direct and
iterative linear solvers built using the generic SUNLinearSolver API (see
§10). These solvers may utilize a
SUNMatrix object (see §9) for
storing Jacobian information, or they may be matrix-free. Since
CVODE can operate on any valid SUNLinearSolver implementation, the set
of linear solver modules available to CVODE will expand as new
SUNLinearSolver modules are developed.
Additionally, CVODE includes the diagonal linear solver interface, CVDIAG, that creates an internally generated diagonal approximation to the Jacobian.
For users employing SUNMATRIX_DENSE or SUNMATRIX_BAND Jacobian matrices, CVODE includes algorithms for their approximation through difference quotients, although the user also has the option of supplying a routine to compute the Jacobian (or an approximation to it) directly. This user-supplied routine is required when using sparse or user-supplied Jacobian matrices.
For users employing matrix-free iterative linear solvers, CVODE includes an algorithm for the approximation by difference quotients of the product \(Mv\). Again, the user has the option of providing routines for this operation, in two phases: setup (preprocessing of Jacobian data) and multiplication.
For preconditioned iterative methods, the preconditioning must be supplied by the user, again in two phases: setup and solve. While there is no default choice of preconditioner analogous to the difference-quotient approximation in the direct case, the references [26, 31], together with the example and demonstration programs included with CVODE, offer considerable assistance in building preconditioners.
CVODE’s linear solver interface consists of four primary phases, devoted to (1) memory allocation and initialization, (2) setup of the matrix data involved, (3) solution of the system, and (4) freeing of memory. The setup and solution phases are separate because the evaluation of Jacobians and preconditioners is done only periodically during the integration, and only as required to achieve convergence.
CVODE also provides two preconditioner modules, for use with any of
the Krylov iterative linear solvers. The first one, CVBANDPRE, is
intended to be used with NVECTOR_SERIAL, NVECTOR_OPENMP or NVECTOR_PTHREADS
and provides a banded difference-quotient Jacobian-based preconditioner,
with corresponding setup and solve routines. The second preconditioner
module, CVBBDPRE, works in conjunction with NVECTOR_PARALLEL and generates a
preconditioner that is a block-diagonal matrix with each block being a
banded matrix.
All state information used by CVODE to solve a given problem is saved in a structure, and a pointer to that structure is returned to the user. There is no global data in the CVODE package, and so, in this respect, it is reentrant. State information specific to the linear solver is saved in a separate structure, a pointer to which resides in the CVODE memory structure. The reentrancy of CVODE was motivated by the anticipated multicomputer extension, but is also essential in a uniprocessor setting where two or more problems are solved by intermixed calls to the package from within a single user program.