2.4.10.1. LSRKStep User-callable functions
This section describes the LSRKStep-specific functions that may be called by the user to setup and then solve an IVP using the LSRKStep time-stepping module. As mentioned in Section §2.4.3, shared ARKODE-level routines may be used for the large majority of LSRKStep configuration and use. In this section, we describe only those routines that are specific to LSRKStep.
As discussed in the main ARKODE user-callable function introduction, each of ARKODE’s time-stepping modules clarifies the categories of user-callable functions that it supports. LSRKStep supports the following categories:
temporal adaptivity
LSRKStep does not have forcing function support when converted to a
SUNStepper or MRIStepInnerStepper. See
ARKodeCreateSUNStepper() and ARKStepCreateMRIStepInnerStepper()
for additional details.
2.4.10.1.1. LSRKStep initialization functions
-
void *LSRKStepCreateSTS(ARKRhsFn rhs, sunrealtype t0, N_Vector y0, SUNContext sunctx);
This function allocates and initializes memory for a problem to be solved using STS methods from the LSRKStep time-stepping module in ARKODE.
- Arguments:
rhs – the name of the C function (of type
ARKRhsFn()) defining the right-hand side function.t0 – the initial value of \(t\).
y0 – the initial condition vector \(y(t_0)\).
sunctx – the
SUNContextobject (see §1.3)
- Return value:
If successful, a pointer to initialized problem memory of type
void*, to be passed to all user-facing LSRKStep routines listed below. If unsuccessful, aNULLpointer will be returned, and an error message will be printed tostderr.
-
void *LSRKStepCreateSSP(ARKRhsFn rhs, sunrealtype t0, N_Vector y0, SUNContext sunctx);
This function allocates and initializes memory for a problem to be solved using SSP methods from the LSRKStep time-stepping module in ARKODE.
- Arguments:
rhs – the name of the C function (of type
ARKRhsFn()) defining the right-hand side function.t0 – the initial value of \(t\).
y0 – the initial condition vector \(y(t_0)\).
sunctx – the
SUNContextobject (see §1.3)
- Return value:
If successful, a pointer to initialized problem memory of type
void*, to be passed to all user-facing LSRKStep routines listed below. If unsuccessful, aNULLpointer will be returned, and an error message will be printed tostderr.
2.4.10.1.2. Optional input functions
-
int LSRKStepSetSTSMethod(void *arkode_mem, ARKODE_LSRKMethodType method);
This function selects the LSRK STS method that should be used. The list of allowable values for this input is below.
LSRKStepCreateSTS()defaults to usingARKODE_LSRK_RKC_2.- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
method – Type of the method.
- Return value:
ARK_SUCCESS if successful
ARK_ILL_INPUT if an argument had an illegal value (e.g. typo in the method type).
-
int LSRKStepSetSSPMethod(void *arkode_mem, ARKODE_LSRKMethodType method);
This function selects the LSRK SSP method that should be used. The list of allowable values for this input is below.
LSRKStepCreateSSP()defaults to usingARKODE_LSRK_SSP_S_2.- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
method – Type of the method.
- Return value:
ARK_SUCCESS if successful
ARK_ILL_INPUT if an argument had an illegal value (e.g. typo in the method type).
Allowable Method Families
-
enum ARKODE_LSRKMethodType
-
enumerator ARKODE_LSRK_RKC_2
Second order Runge–Kutta–Chebyshev method
-
enumerator ARKODE_LSRK_RKL_2
Second order Runge–Kutta–Legendre method
-
enumerator ARKODE_LSRK_SSP_S_2
Second order, s-stage SSP(s,2) method
-
enumerator ARKODE_LSRK_SSP_S_3
Third order, s-stage SSP(s,3) method
-
enumerator ARKODE_LSRK_SSP_10_4
Fourth order, 10-stage SSP(10,4) method
-
enumerator ARKODE_LSRK_RKC_2
-
int LSRKStepSetSTSMethodByName(void *arkode_mem, const char *emethod);
This function selects the LSRK STS method by name. The list of allowable values for this input is above.
LSRKStepCreateSTS()defaults to usingARKODE_LSRK_RKC_2.- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
emethod – the method name.
- Return value:
ARK_SUCCESS if successful
ARK_ILL_INPUT if an argument had an illegal value (e.g. typo in the method name).
Note
This routine will be called by
ARKodeSetOptions()when using the key “arkid.sts_method_name”.
-
int LSRKStepSetSSPMethodByName(void *arkode_mem, const char *emethod);
This function selects the LSRK SSP method by name. The list of allowable values for this input is above.
LSRKStepCreateSSP()defaults to usingARKODE_LSRK_SSP_S_2.- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
emethod – the method name.
- Return value:
ARK_SUCCESS if successful
ARK_ILL_INPUT if an argument had an illegal value (e.g. typo in the method name).
Note
This routine will be called by
ARKodeSetOptions()when using the key “arkid.ssp_method_name”.
-
int LSRKStepSetDomEigFn(void *arkode_mem, ARKDomEigFn dom_eig);
Specifies the user-supplied dominant eigenvalue approximation routine to be used for determining the number of stages that will be used by either the RKC or RKL methods.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
dom_eig – name of user-supplied dominant eigenvalue approximation function (of type
ARKDomEigFn()).
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.
Note
When using RKC or RKL methods, users must supply a
ARKDomEigFnfunction or attach a dominant eigenvalue estimator withLSRKStepSetDomEigEstimator().
-
int LSRKStepSetDomEigEstimator(void *arkode_mem, SUNDomEigEstimator DEE);
Specifies the dominant eigenvalue estimator (DEE) used to determine the number of stages in an RKC or RKL method. This function is an alternative to supplying a dominant eigenvalue function with
LSRKStepSetDomEigFn().- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
DEE – the dominant eigenvalue estimator to use.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.ARK_ILL_INPUT if an argument had an illegal value (e.g.,
DEEdoes not implement the required operations)ARK_DEE_FAIL if the call to
SUNDomEigEstimator_SetATimes()failed
Added in version 7.5.0 (ARKODE 6.5.0).
Note
When using RKC or RKL methods, users must supply a
ARKDomEigFnfunction or attach a dominant eigenvalue estimator withLSRKStepSetDomEigEstimator(). If both are provided then the estimatorDEEwill be used and the function ignored.ARKODE will supply the
SUNDomEigEstimatorwith an internal Jacobian-vector product approximation function. Users may supply their own Jacobian-vector product function by callingSUNDomEigEstimator_SetATimes()after attaching the estimator withLSRKStepSetDomEigEstimator().
-
int LSRKStepSetDomEigFrequency(void *arkode_mem, long int nsteps);
Specifies the number of steps after which the dominant eigenvalue information is considered out-of-date, and should be recomputed. This only applies to RKL and RKC methods.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
nsteps – the dominant eigenvalue re-computation update frequency. A value
nsteps = 0indicates that the dominant eigenvalue will not change throughout the simulation.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.
Note
If LSRKStepSetDomEigFrequency routine is not called, then the default
nstepsis set to \(25\) as recommended in [163]. Calling this function withnsteps < 0resets the default value whilensteps = 0refers to constant dominant eigenvalue.Calling this function with
nsteps < 0resets the default value whilensteps = 0refers to constant dominant eigenvalue.This routine will be called by
ARKodeSetOptions()when using the key “arkid.dom_eig_frequency”.
-
int LSRKStepSetMaxNumStages(void *arkode_mem, int stage_max_limit);
Specifies the maximum number of stages allowed within each time step. This bound only applies to RKL and RKC methods.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
stage_max_limit – maximum allowed number of stages \((>=2)\).
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.
Note
If
LSRKStepSetMaxNumStages()is not called, the defaultstage_max_limitis set to \(200\). Calling this function withstage_max_limit < 2resets the default value.This limit should be chosen with consideration of the following proportionality: \(s^2 \sim - h\lambda\), where \(s\) is the number of stages used, \(h\) is the current step size and \(\lambda\) is the dominant eigenvalue.
This routine will be called by
ARKodeSetOptions()when using the key “arkid.max_num_stages”.
-
int LSRKStepSetDomEigSafetyFactor(void *arkode_mem, sunrealtype dom_eig_safety);
Specifies a safety factor to use for the result of the dominant eigenvalue estimation function. This value is used to scale the magnitude of the dominant eigenvalue, in the hope of ensuring a sufficient number of stages for the method to be stable. This input is only used for RKC and RKL methods.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
dom_eig_safety – safety factor \((\ge 1)\).
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.
Note
If
LSRKStepSetDomEigSafetyFactor()is not called, then the defaultdom_eig_safetyis set to \(1.01\). Calling this function withdom_eig_safety < 1resets the default value.This routine will be called by
ARKodeSetOptions()when using the key “arkid.dom_eig_safety_factor”.
-
int LSRKStepSetUseAnalyticStabilityRegion(void *arkode_mem, sunbooleantype analytic_stab_region);
Specifies whether to use the analytic stability region for determining the number of stages in STS methods.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
analytic_stab_region – Use the analytic stability region if
SUNTRUE; use the inscribed ellipse stability region ifSUNFALSE.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.
Note
This input is only used for RKC and RKL methods.
If
LSRKStepSetUseAnalyticStabilityRegion()is not called, then the defaultanalytic_stab_regionis set toSUNFALSE. This routine will be called byARKodeSetOptions()when using the key “arkid.use_analytic_stability_region”.LSRKStepSetUseAnalyticStabilityRegion()sets whether to use the exact stability region or an ellipse that is fully inscribed in the stability region for determining stability in RKC and RKL methods. Whichever region is selected, LSRKStep will ensure that the complex number \(z=h\lambda\), where \(h\) is the current time step size and \(\lambda\) is the estimated dominant eigenvalue, is in this region. Since the ellipse is smaller than the analytical stability region it provides a more conservative estimate, which may be appropriate for problems wherein sub-dominant eigenvalues may also limit stability of the method. Thus, the ellipse may result in a smaller time step size, more internal stages, or both, when compared to using the analytical stability region. We note that in either case, since LSRKStep does not examine the full eigenvalue spectrum, there is always some risk of instability. For applications where this is a concern, we recommend callingLSRKStepSetDomEigSafetyFactor()with a dom_eig_safety value significantly larger than 1.If a stable step cannot be achieved even with the maximum allowed number of stages, LSRKStep adjusts the time step size to maintain stability. Even if the analytic stability region is employed by calling this function, it uses an inscribed ellipse to determine the maximum stable time step once this stage limit is reached.
If
LSRKStepSetUseAnalyticStabilityRegion()is called during integration, the change will take effect at the next step attempt. Both analytic and ellipse stability regions of RKC and RKL methods with 10 stages are shown in the figure below.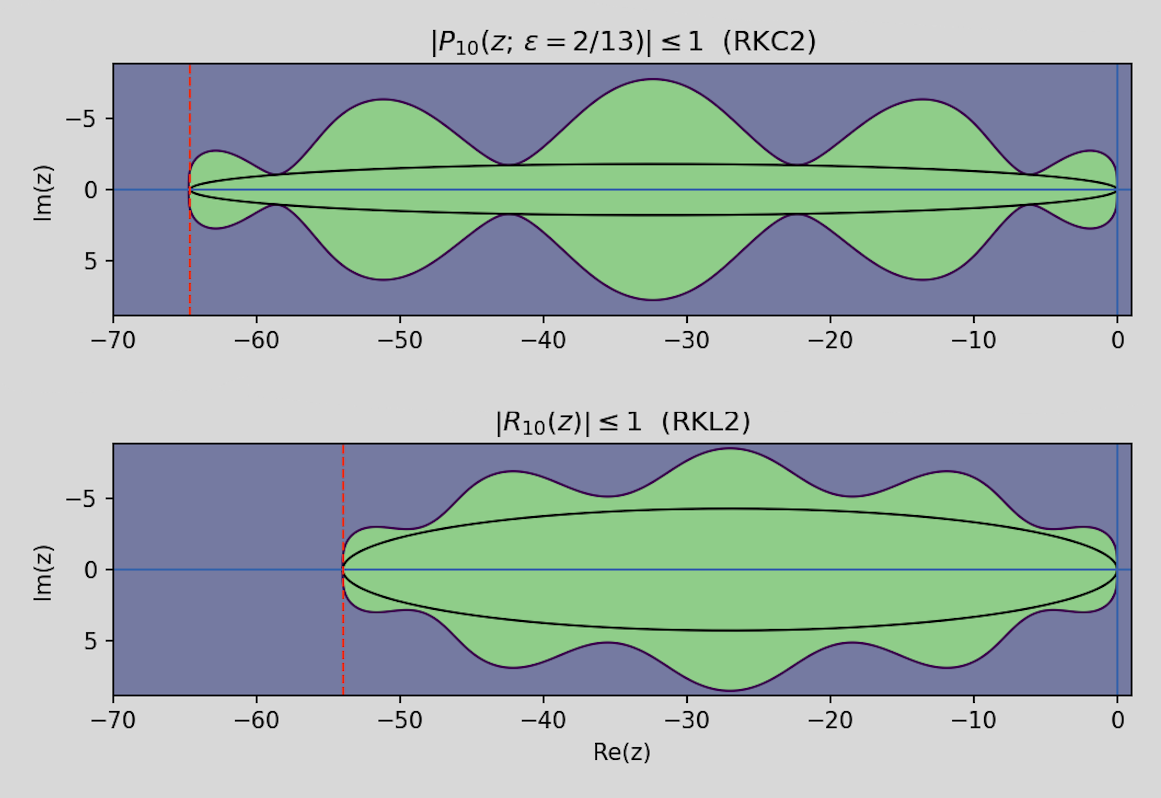
-
int LSRKStepSetNumDomEigEstInitPreprocessIters(void *arkode_mem, int num_iters);
Specifies the number of the preprocessing iterations before the very first estimate call.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
num_iters – the number of iterations.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.
Added in version 7.5.0 (ARKODE 6.5.0).
Note
If LSRKStepSetNumDomEigEstInitPreprocessIters routine is not called, then the default value of the estimator is used. Calling this function with
num_iters < 0resets the default.This routine will be called by
ARKodeSetOptions()when using the key “arkid.num_dom_eig_est_init_preprocess_iters”.
-
int LSRKStepSetNumDomEigEstPreprocessIters(void *arkode_mem, int num_iters);
Specifies the number of the preprocessing iterations before each estimate call after the very first estimate.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
num_iters – the number of iterations.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.ARK_DEE_FAIL if the call to
SUNDomEigEstimator_SetNumPreprocessIters()failed.
Added in version 7.5.0 (ARKODE 6.5.0).
Note
If LSRKStepSetNumDomEigEstPreprocessIters routine is not called, then the default value of 0 is used. Calling this function with
num_iters < 0resets the default.This routine will be called by
ARKodeSetOptions()when using the key “arkid.num_dom_eig_est_preprocess_iters”.
-
int LSRKStepSetNumSSPStages(void *arkode_mem, int num_of_stages);
Sets the number of stages,
sinSSP(s, p)methods. This input is only utilized by SSPRK methods.ARKODE_LSRK_SSP_S_2–num_of_stagesmust be greater than or equal to 2ARKODE_LSRK_SSP_S_3–num_of_stagesmust be a perfect-square greater than or equal to 4ARKODE_LSRK_SSP_10_4–num_of_stagescannot be modified from 10, so this function should not be called.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
num_of_stages – number of stages \((>1)\) for
SSP(s,2)and \((n^2 = s \geq 4)\) forSSP(s,3).
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if
arkode_memwasNULL.ARK_ILL_INPUT if an argument had an illegal value (e.g. SSP method is not declared)
Note
If
LSRKStepSetNumSSPStages()is not called, the defaultnum_of_stagesis set. Calling this function withnum_of_stages <= 0resets the default values:num_of_stages = 2forARKODE_LSRK_SSP_S_2num_of_stages = 4forARKODE_LSRK_SSP_S_3num_of_stages = 10forARKODE_LSRK_SSP_10_4
This routine will be called by
ARKodeSetOptions()when using the key “arkid.num_ssp_stages”.Changed in version 7.7.0 (ARKODE 6.7.0): The default number of stages for
ARKODE_LSRK_SSP_S_2andARKODE_LSRK_SSP_S_3were changed from 10 and 9, respectively, to their minimum allowable values of 2 and 4.
2.4.10.1.3. Optional output functions
-
int LSRKStepGetNumDomEigUpdates(void *arkode_mem, long int *dom_eig_num_evals);
Returns the number of dominant eigenvalue evaluations (so far).
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
dom_eig_num_evals – number of calls to the user’s
dom_eigfunction.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if the LSRKStep memory was
NULL
-
int LSRKStepGetMaxNumStages(void *arkode_mem, int *stage_max);
Returns the max number of stages used in any single step (so far).
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
stage_max – max number of stages used.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if the LSRKStep memory was
NULLARK_ILL_INPUT if
stage_maxis illegal
-
int LSRKStepGetNumDomEigEstRhsEvals(void *arkode_mem, long int *nfeDQ);
Returns the number of RHS function evaluations used in the difference quotient Jacobian approximations (so far).
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
nfeDQ – number of rhs calls.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if the LSRKStep memory was
NULLARK_ILL_INPUT if
nfeDQis illegal
Added in version 7.5.0 (ARKODE 6.5.0).
Note
The number of RHS evaluations is non-zero only when using a dominant eigenvalue estimator and the internal Jacobian-vector product approximation.
-
int LSRKStepGetNumDomEigEstIters(void *arkode_mem, long int *num_iters);
Returns the number of iterations used in the dominant eigenvalue estimator (DEE) (so far).
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
num_iters – number of iterations.
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if the LSRKStep memory was
NULLARK_ILL_INPUT if
num_itersis illegal
Added in version 7.5.0 (ARKODE 6.5.0).
2.4.10.1.4. LSRKStep re-initialization function
To reinitialize the LSRKStep module for the solution of a new problem,
where a prior call to LSRKStepCreateSTS() or LSRKStepCreateSSP()
has been made, the user must call the function LSRKStepReInitSTS()
or LSRKStepReInitSSP(), accordingly. The new problem must have
the same size as the previous one. This routine retains the current settings
for all LSRKstep module options and performs the same input checking and
initializations that are done in LSRKStepCreateSTS() or
LSRKStepCreateSSP(), but it performs no memory allocation as it
assumes that the existing internal memory is sufficient for the new problem.
A call to this re-initialization routine deletes the solution history that
was stored internally during the previous integration, and deletes any
previously-set tstop value specified via a call to
ARKodeSetStopTime(). Following a successful call to
LSRKStepReInitSTS() or LSRKStepReInitSSP(),
call ARKodeEvolve() again for the solution of the new problem.
One important use of the LSRKStepReInitSTS() and
LSRKStepReInitSSP() function is in the treating of jump
discontinuities in the RHS function. Except in cases of fairly small
jumps, it is usually more efficient to stop at each point of discontinuity
and restart the integrator with a readjusted ODE model, using a call to this
routine. To stop when the location of the discontinuity is known, simply
make that location a value of tout. To stop when the location of
the discontinuity is determined by the solution, use the rootfinding feature.
In either case, it is critical that the RHS function not incorporate the
discontinuity, but rather have a smooth extension over the discontinuity,
so that the step across it (and subsequent rootfinding, if used) can be done
efficiently. Then use a switch within the RHS function (communicated through
user_data) that can be flipped between the stopping of the integration
and the restart, so that the restarted problem uses the new values (which
have jumped). Similar comments apply if there is to be a jump in the
dependent variable vector.
-
int LSRKStepReInitSTS(void *arkode_mem, ARKRhsFn rhs, sunrealtype t0, N_Vector y0);
Provides required problem specifications and re-initializes the LSRKStep time-stepper module when using STS methods.
All previously set options are retained but may be updated by calling the appropriate “Set” functions.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
rhs – the name of the C function (of type
ARKRhsFn()) defining the right-hand side function.t0 – the initial value of \(t\).
y0 – the initial condition vector \(y(t_0)\).
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if the LSRKStep memory was
NULLARK_MEM_FAIL if memory allocation failed
ARK_NO_MALLOC if memory allocation failed
ARK_CONTROLLER_ERR if unable to reset error controller object
ARK_ILL_INPUT if an argument had an illegal value.
Note
If using a
SUNDomEigEstimator, the initial guess for the dominant eigenvalue should be reinitialized withSUNDomEigEstimator_SetInitialGuess().
-
int LSRKStepReInitSSP(void *arkode_mem, ARKRhsFn rhs, sunrealtype t0, N_Vector y0);
Provides required problem specifications and re-initializes the LSRKStep time-stepper module when using SSP methods.
All previously set options are retained but may be updated by calling the appropriate “Set” functions.
- Arguments:
arkode_mem – pointer to the LSRKStep memory block.
rhs – the name of the C function (of type
ARKRhsFn()) defining the right-hand side function.t0 – the initial value of \(t\).
y0 – the initial condition vector \(y(t_0)\).
- Return value:
ARK_SUCCESS if successful
ARK_MEM_NULL if the LSRKStep memory was
NULLARK_MEM_FAIL if memory allocation failed
ARK_NO_MALLOC if memory allocation failed
ARK_CONTROLLER_ERR if unable to reset error controller object
ARK_ILL_INPUT if an argument had an illegal value.